CAN總線數(shù)據(jù)交換基本原理
2019-05-28 11:03:32
root
為了提高數(shù)據(jù)傳遞的可靠性,CAN數(shù)據(jù)總線系統(tǒng)的兩條導線(雙絞線)分別用于不同的數(shù)據(jù)傳輸,這兩條線分別為CAN-HIGH和CAN-LOW線。
在靜止狀態(tài)時,這兩條導線上的作用有相同預先設定值,該值稱為靜電平。對于CAN驅(qū)動數(shù)據(jù)總線來說,這個值大約為2.5V。
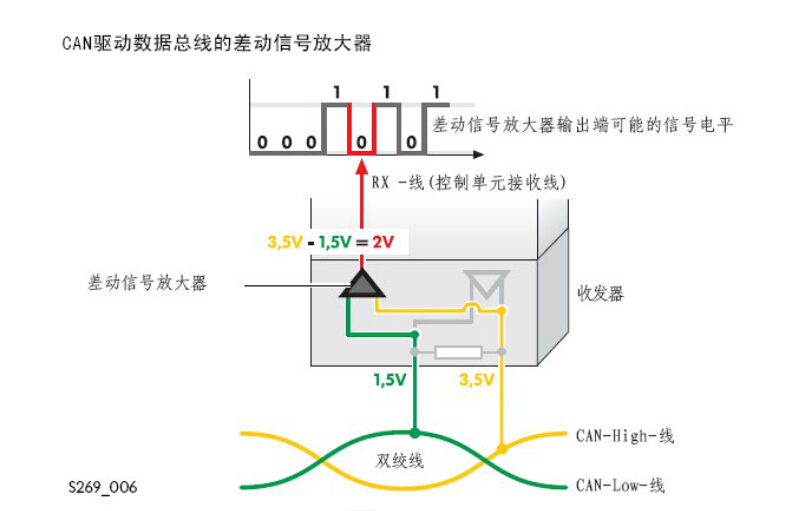
靜電平也成為隱性狀態(tài),因為連接的所有控制單元均可以修改它。在顯性狀態(tài)時,CAN-HIGH線上的電壓值會升高一個預定值(對CAN驅(qū)動數(shù)據(jù)總線來說,這個值至少為1V)。而CAN-LOW線上的電壓值會降低一個同樣值(對于CAN驅(qū)動數(shù)據(jù)總線來說,這個值至少為1V)。于是CAN驅(qū)動數(shù)據(jù)總線上,CAN-HIGH線就處于激活狀態(tài),其他電壓不低于3.5(2.5V+1V=3.5V),而CAN-LOW線上的電壓值最多可降至1.5V(2.5V-1V=1.5V)。
因此在隱形狀態(tài)時,CAN-HIGH線與CAN-LOW線的電壓差為0V,在顯性狀態(tài)時該差值最低為2V。
控制單元是通過收發(fā)器聯(lián)接到CAN驅(qū)動總線上的,在這個收發(fā)器內(nèi)有一個接收器,該接收器是安裝在接受一側(cè)的差動信號放大器。差動信號放大器用于處理來自CAN-HIGH和CAN-LOW線的信號,除此外還負責將轉(zhuǎn)換后的信號傳至控制單元的CAN接手區(qū)。這個轉(zhuǎn)換后的信號成為差動信號放大器的輸出電壓。
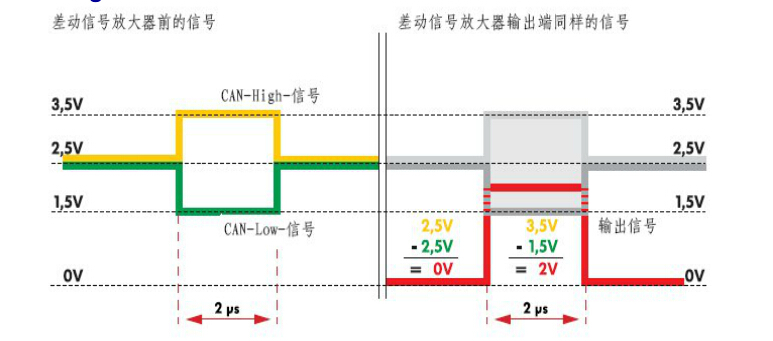
差動信號放大器用CAN-HIGH線上的電壓(UCAN-HIGH)減去CAN-LOW線上的電壓(UCAN-LOW),就得出了輸入電壓,用這種芳芳可以消除靜電平(對于CAN驅(qū)動數(shù)據(jù)總線來說是2.5V)或其他任何重疊的電壓。
由于數(shù)據(jù)總線也要布置在發(fā)動機艙內(nèi),所以數(shù)據(jù)總線就要遭受各種干擾,在保養(yǎng)時要考慮對地短路和蓄電池電壓、點火裝置的火花放電和靜態(tài)放電。
由于CAN-HIGH線和CAN-LOW線是扭絞在一起的雙絞線,所以干擾脈沖總是有規(guī)律作用在兩條線上。由于差動信號放大器總是用CAN-HIGH線上的電壓減去CAN-LOW線上的電壓,因此在經(jīng)過此處理后差動信號中就不再有干擾脈沖了。
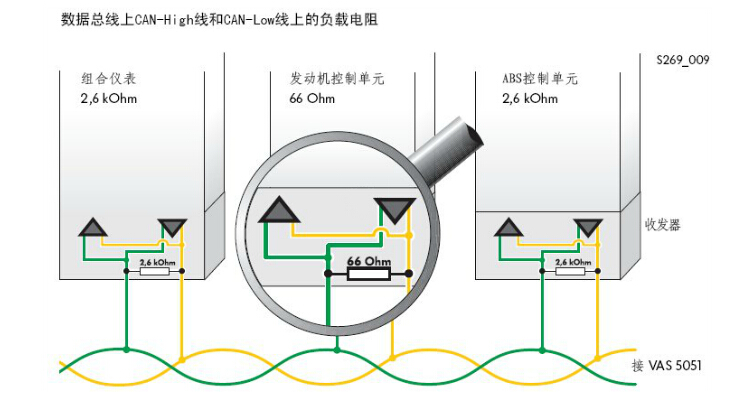
收發(fā)器發(fā)送一側(cè)的任務是將控制單元內(nèi)的CAN控制器的較弱信號放大,使之達到CAN導線上的信號電平和控制單元輸入端的信號電平。聯(lián)接在CAN數(shù)據(jù)總線上的控制單元的作用就像是CAN導線上的一個負載電阻(因為裝有電子元件),這個負載電阻取決于聯(lián)接的控制單元數(shù)量和其電阻。
收發(fā)器將CAN信號輸送到CAN數(shù)據(jù)總線的兩條導線上,相應地在CAN-HIGH線上的電壓就升高,而在CAN-LOW線上的電壓就降低一個同樣大小的值。對于驅(qū)動CAN總線數(shù)據(jù)來說,一條導線上的電壓改變值不低于1V,對于CAN舒適/Infotainment總線來說,這個值不低于3.6V。